李雅普诺夫稳定性分析——学习笔记
Last updated on:2 years ago
李雅普诺夫函数和李雅普诺夫稳定在最优化和自动控制理论都有用到,这里作一些简单小结。
引言
稳定性是系统的重要特征,是系统正常工作的必要条件,它描述初始系统下系统方程的解是否具有收敛性,而与输入作用无关。
李雅普诺夫稳定性采用了状态向量描述,不仅适用与单变量、线性、定常系统,而且适用于多变量、非线性、时变系统。用该稳定性理论,判断系统稳定性有直接法和间接法两种之分。
基本概念
设系统方程为
$$\pmb{\dot{x}} = \pmb{f}(\pmb{x}, t)$$
式中,$\pmb{x}$为n维状态向量,且显含时间变量$t$;$\pmb{f}(\pmb{x}, t)$为线性或非线性、定常或时变的n维向量函数,其展开式为
$$\dot{x}_i = f_i (x_1, x_2, …, x_n, t), i = 1, 2, 3, …, n$$
方程解为$\pmb{x}(t;\pmb{x}_0, t_0)$,式中,$\pmb{x}_0$和$t_0$分别为初始状态向量和初始时刻,则初始条件$\pmb{x}_0$必满足$\pmb{x}(t_0;\pmb{x}_0, t_0) = \pmb{x}_0$。
平衡状态
对于所有$t$,满足
$$\pmb{\dot{x}}_e = \pmb{f}(\pmb{x}_e, t) = \pmb{0}$$
的状态$\pmb{x}_e$称为平衡状态。
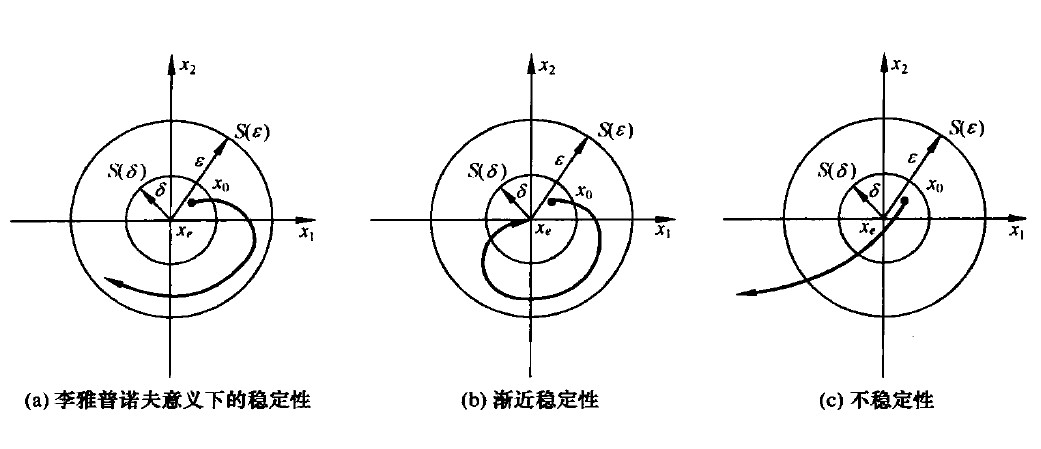
李雅普诺夫意义下的稳定性
设系统初始状态位于平衡状态$\pmb{x}_e$为球心、$\delta$为半径的闭球域$S(\delta)$内,即
$$||\pmb{x}_0 - \pmb{x}_e|| \leq \delta, t = t_0$$
若能使系统方程的解$\pmb{x}(t;\pmb{x}_0, t_0)$在$t\to \infty$的过程中,都位于以$\pmb{x}_e$为球心、任意规定半径为$\varepsilon$的闭球域$S(\varepsilon)$内,即
$$||\pmb{x}(t;\pmb{x}_0, t_0)- \pmb{x}_0|| \leq \varepsilon, t = t\ge 0$$
则称系统的平衡状态$\pmb{x}_e$在李雅普诺夫意义下是稳定的。
渐进稳定性还收敛于$\pmb{x}_e$,不稳定性则是变化轨迹超出$S(\varepsilon)$。
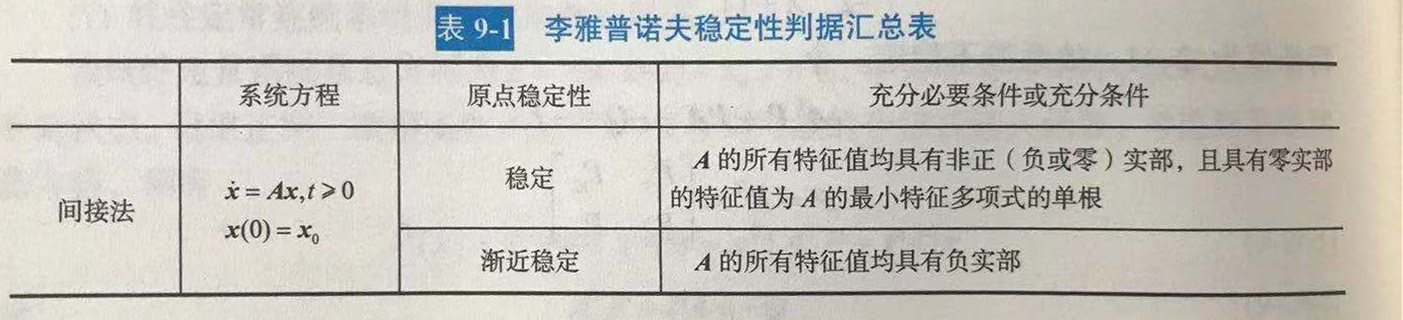
李雅普诺夫第一法/间接法
利用线性系统微分方程的解。
以线性定常系统为例。
对于线性定常系统$\pmb{\dot{x}} = \pmb{Ax}, \pmb{x}(0) = \pmb{x}_0, t\geq 0$,有:
- 系统的每一平衡状态是在李雅普诺夫意义下稳定的充分必要条件是,$\pmb{A}$ 的所有特征值均具有非正(负或零)实部,且具有零实部的特征值为$\pmb{A}$ 的最小多项式的单根。
- 系统的唯一平衡状态$x_e = 0$ 是渐近稳定的充分必要条件是,$\pmb{A}$ 的所有特征值均具有负实部。
由于求解线性微分方程比较困难,所以不常用。
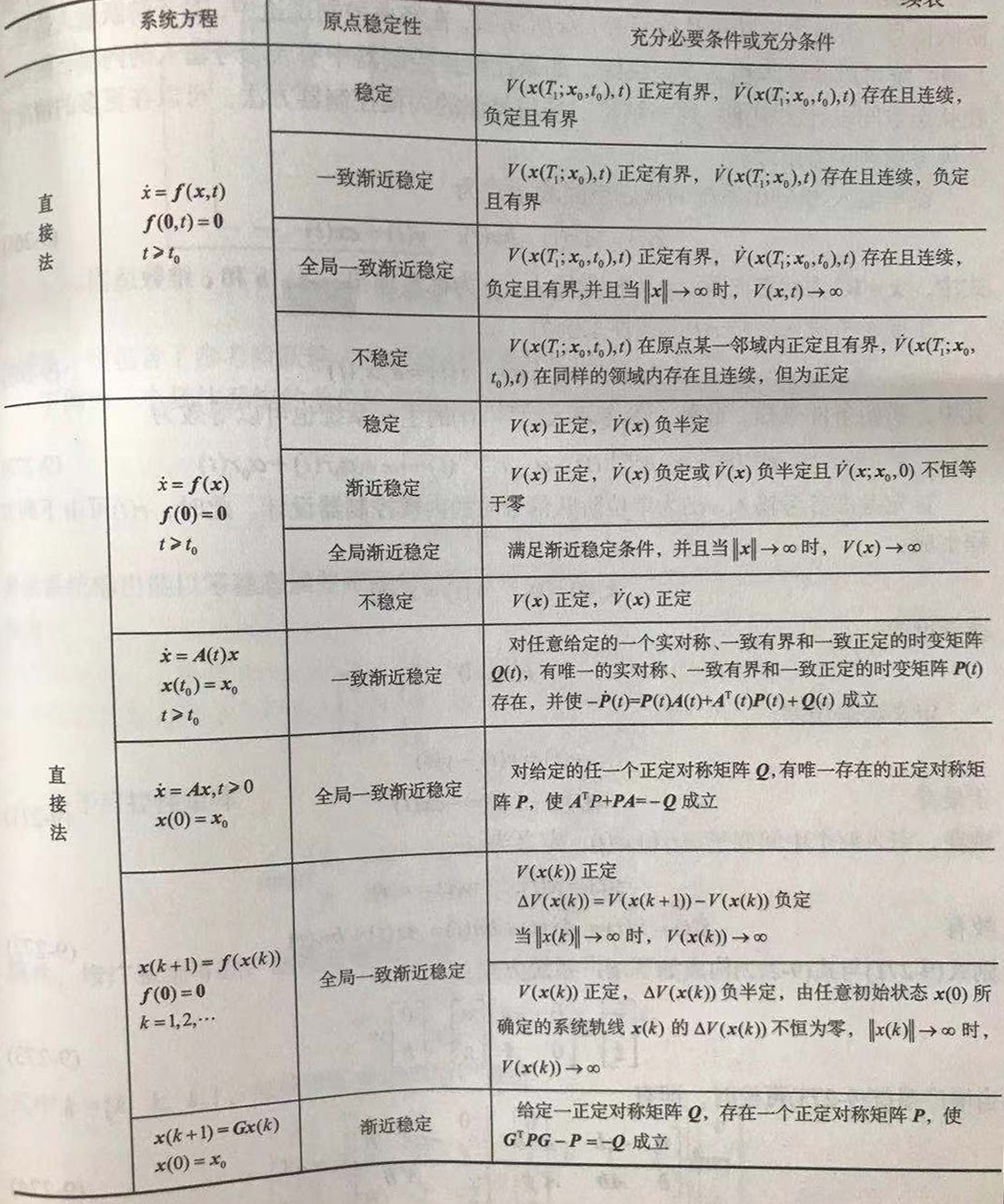
李雅普诺夫第二法/直接法
利用经验和技巧来构建李雅普诺夫函数,进而利用李雅普诺夫函数来判断系统的稳定性。
系统能量随着时间推移而衰减,系统迟早会达到平衡状态。可以虚构一个的能量函数$V(\pmb{x},t)$,若不显含$t$,$V(\pmb{x})$它就是一个标量函数。
定常系统渐进性稳定判别定理1
对于定常系统
$$\pmb{\dot{x}}=\pmb{f(x)}, t\ge 0$$
其中,$\pmb{f(0)} = 0$,如果存在一个具有连续一阶导数的标量函数$V(\pmb{x})$,$V(\pmb{0}) = 0$,并且对于状态空间X中的一切非零点$\pmb{x}$满足如下条件:
- $V(\pmb{x})$为正定
- $\dot{V}(\pmb{x})$为负定
- 当$\pmb{x} \to \infty$ 时 $V(\pmb{x}) \to \infty$
则系统的原点平衡状态是大范围渐进稳定的。
定常系统渐进性稳定判别定理2
对于定常系统
$$\pmb{\dot{x}}=\pmb{f(x)}, t\ge 0$$
其中,$\pmb{f(0)} = 0$,如果存在一个具有连续一阶导数的标量函数$V(\pmb{x})$,$V(\pmb{0}) = 0$,并且对于状态空间X中的一切非零点$\pmb{x}$满足如下条件:
- $V(\pmb{x})$为正定
- $\dot{V}(\pmb{x})$为半负定
- 对于任意$\pmb{x}\in X, \dot{V}(\pmb{x}(t; \pmb{x}_0 ,0)) \not\equiv$
- 当$\pmb{x} \to \infty$ 时 $V(\pmb{x}) \to \infty$
则系统的原点平衡状态是大范围渐进稳定的。
不稳定性判据
有时候,多次试取李雅普诺夫函数都得不到正确答案时,考虑其为不稳定。
对于定常系统
$$\pmb{\dot{x}}=\pmb{f(x)}, t\ge 0$$
其中,$\pmb{f(0)} = 0$,如果存在一个具有连续一阶导数的标量函数$V(\pmb{x})$,$V(\pmb{0}) = 0$,和围绕原点的域$\pmb{\Omega}$,使得一切$\pmb{x}\in \pmb{\Omega}$和一切$t\ge t_0$满足如下条件:
- $V(\pmb{x})$为正定
- $\dot{V}(\pmb{x})$为正定
则系统平衡状态为不稳定。
参考资料
[1] 胡寿松,自动控制原理第7版,p515-524
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!